Dy
namic
A
utomata
Lab
Home
Publications
Projects
People
Projects
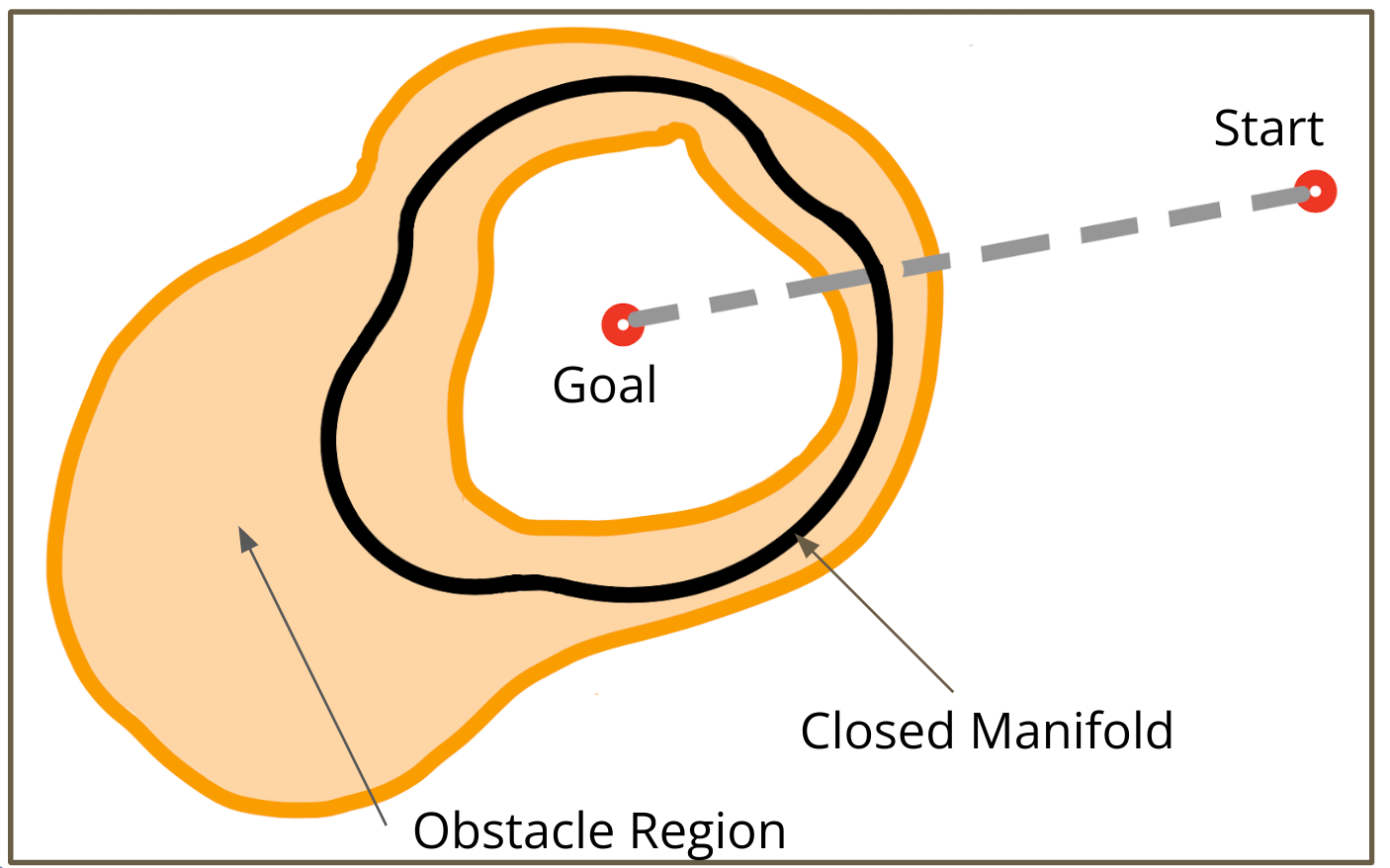
Infeasibility Proofs
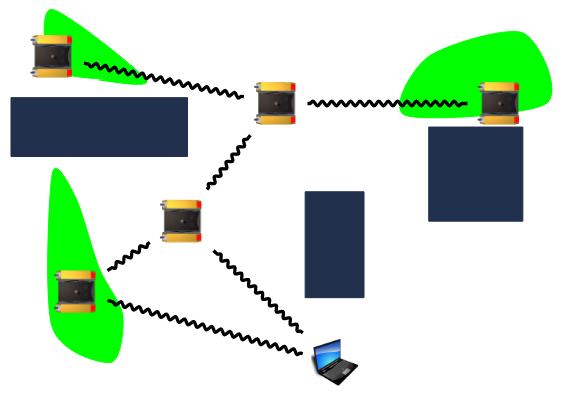
Robot Networks
Planning for HRI
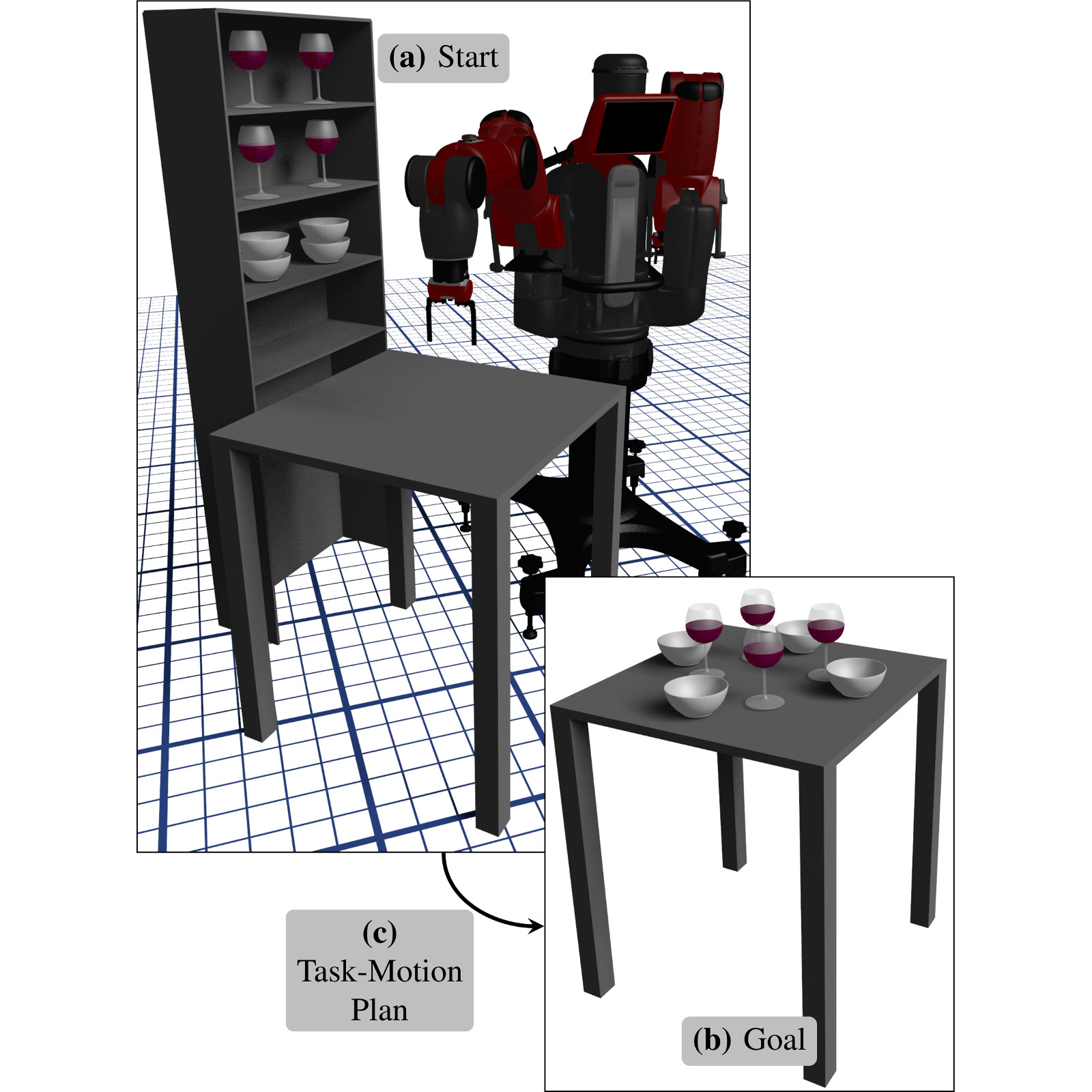
Task and Motion Planning
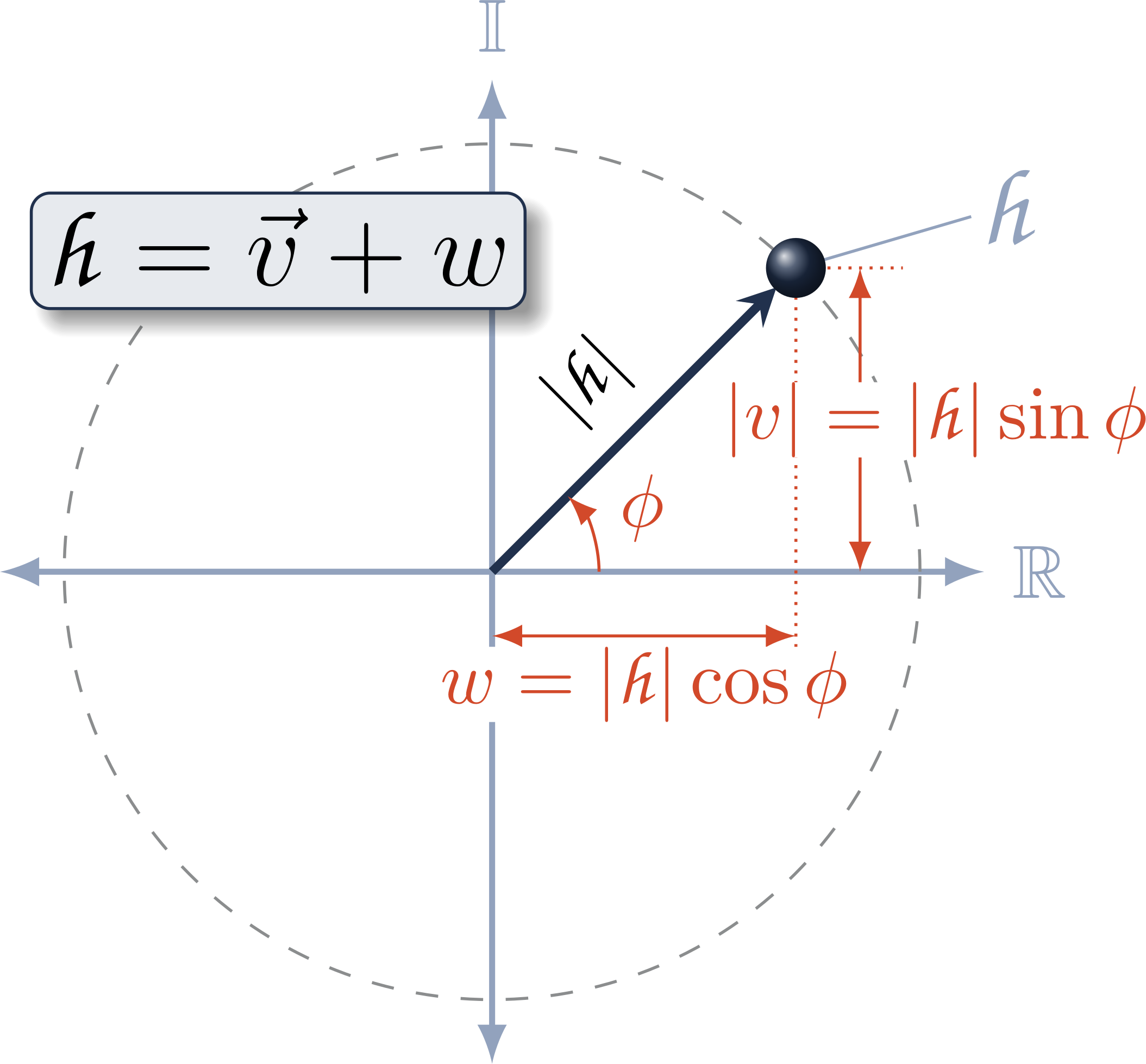
Kinematics & Quaternions
Motion Grammar
Ach Real-time IPC