When robot teams work in unstructured environments, their motions can change which team members can communicate. We consider how motion can affect communication and overall team performance.
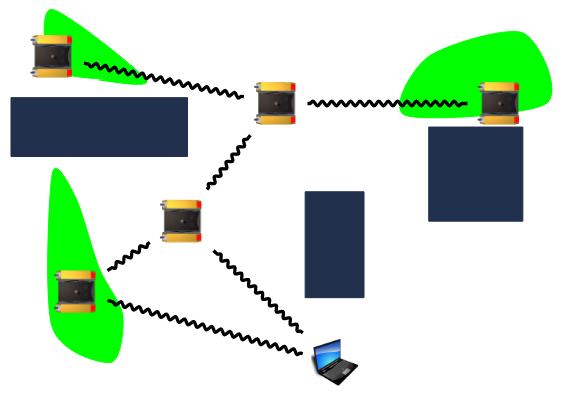
Multiple robots can effectively acquire information from an environment and transmit it to a static base station. However, communication may not be possible everywhere in the environment, so robots must coordinate when and where to rendezvous with disconnected teammates. Such coordination presents challenges since knowing how long it will take to explore requires information about the environment, which is typically what the robots are acquiring. We propose a method to estimate disconnected robots’ state and use observed lack of communication to refine our state estimation, allowing robots to plan for rendezvous or parallel exploration by predicting where teammates are likely to be. We show up to 87% improved performance for exploration tasks against a baseline approach that performs no such predictions.
In many exploration scenarios, it is important for robots to efficiently explore new areas and constantly communicate results. Mobile robots inherently couple motion and network topology due to the effects of position on wireless propagation-e.g. distance or obstacles between network nodes. Information gain is a useful measure of exploration. However, finding paths that maximize information gain while preserving communication is challenging due to the non-Markovian nature of information gain, discontinuities in network topology, and zero-reward local optima. We address these challenges through an optimization and sampling-based algorithm.
Using robots to collect data is an effective way to obtain information from the environment and communicate it to a static base station. Furthermore, robots have the capability to communicate with one another, potentially decreasing the time for data to reach the base station. We present a Mixed Integer Linear Program that reasons about discrete routing choices, continuous robot paths, and their effect on the latency of the data collection task. We analyze our formulation, discuss optimization challenges inherent to the data collection problem, and propose a factored formulation that finds optimal answers more efficiently. Our work is able to find paths that reduce latency by up to 101% compared to treating all robots independently in our tested scenarios.
Exploring robots may fail due to environmental hazards. Thus, robots need to account for the possibility of failure to plan the best exploration paths. Optimizing expected utility enables robots to find plans that balance achievable reward with the inherent risks of exploration. Moreover, when robots rendezvous and communicate to exchange observations, they increase the probability that at least one robot is able to return with the map. Optimal exploration is NP-hard, so we apply a constraint-based approach to enable highly-engineered solution techniques. We model exploration under the possibility of robot failure and communication constraints as an integer, linear program and a generalization of the Vehicle Routing Problem.
